So it’s still rough, but I got most of my code moved over to the new chip. I haven’t got the motor servos on yet, so there’s a chunk of code that mixes rudder into the speed controls to torque the thing into a spin. It seems to work, though the torque effect is pretty small.
Check it out: first video. (WMV, 2.5mb)
I had just gotten the code finished, and it was starting to get dark. I wanted at least one flight attempt in, and didn’t have much time to tweak it. It didn’t land well, though nothing serious happened.
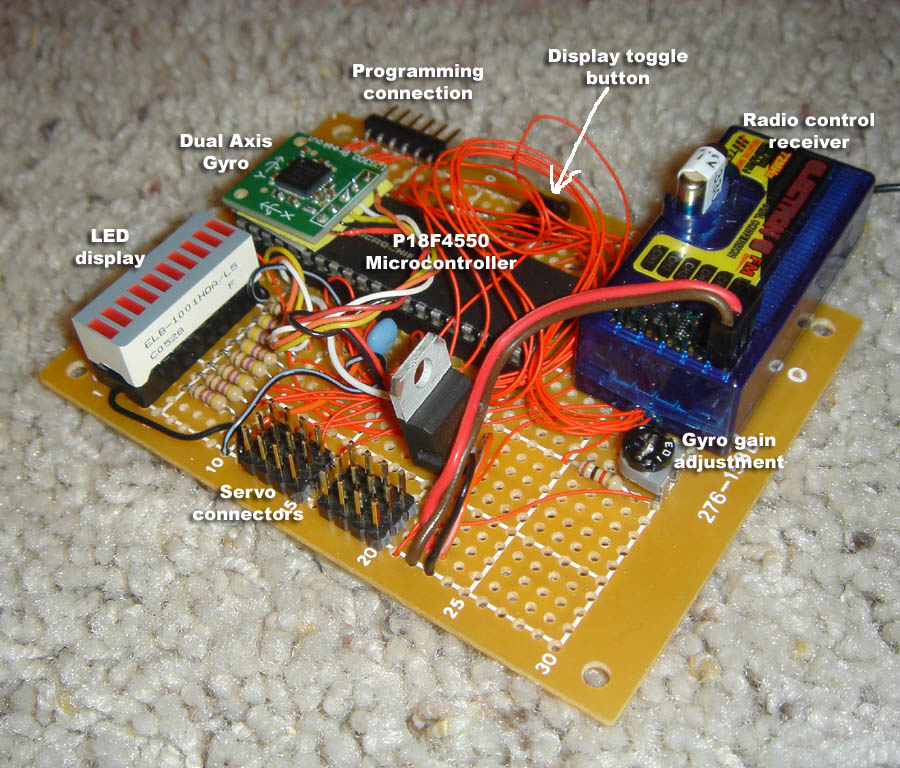
Here’s a shot of the current setup (the heli canopy is for orientation) and a close up of the main board.
{kind=link}
{kind=link}
More as it happens.